酷游-KU游平台登录

关于酷游KU游
产品中心
建筑装饰五金
机械五金件
手动工具
电动工具
五金配附件
其他五金
酷游KU游平台登录
酷游KU游公司新闻
行业动态
媒体报道
在线留言
酷游KU游平台
联系我们
京东商城

酷游KU游官网国产太空机械臂:拥有7处关节 可实现类似人类手臂的运动|肉食系小猴
◈★✿:按计划◈★✿,在神舟十二号任务期间◈★✿,航天员会在机械臂的配合下开展两次舱外作业◈★✿。中国空间站核心舱上的机械臂◈★✿,是我国目前智能程度最高◈★✿、规模与技术难度最大◈★✿、系统最复杂的空间智能制造系统◈★✿。在这次出舱前◈★✿,6月27日肉食系小猴子◈★✿,全系统进行了空间站机械臂大范围移动测试肉食系小猴子◈★✿,一起看一下机械臂测试时的场景◈★✿。
在27日的测试画面中酷游KU游官网◈★✿,我们可以看到肉食系小猴子◈★✿,机械臂通过摆动调整到任务点位后◈★✿,末端执行器旋转方向对准适配器◈★✿,通过中心点确定位置完成锁紧酷游KU游官网◈★✿。 我们可以通过核心舱外不同角度摄像头拍摄的画面肉食系小猴子酷游KU游官网◈★✿,来看一下机械臂的工作状态◈★✿。
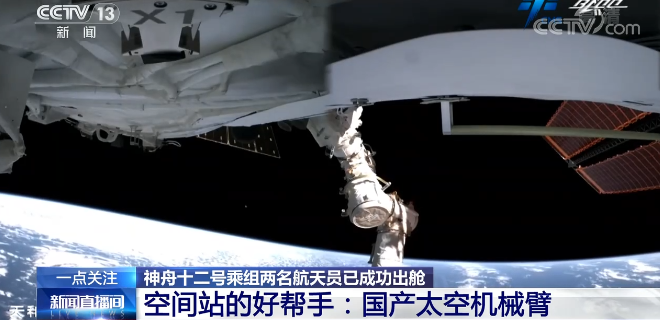

空间站机械臂承担着悬停飞行器抓获肉食系小猴子◈★✿、辅助航天员舱外活动◈★✿、舱外货物搬运◈★✿、舱体状态检查等重要任务◈★✿,这些都需要机械臂具备精准控制和强大的自由运动能力◈★✿。为此◈★✿,空间站机械臂拥有7处关节◈★✿,可以实现类似人类手臂的运动能力肉食系小猴子◈★✿,工作时可以承载重达25吨的大型航天器舱段◈★✿。机械臂其实没有手酷游KU游官网◈★✿,它是靠两端的末端执行器来完成抓取和固定◈★✿,与目标适配器完成连接后◈★✿,机械臂就可以进行旋转◈★✿;而另一端的执行器就成为抓手酷游KU游官网◈★✿,连接端口可以给机械臂提供电力和数据接口酷游KU游官网◈★✿,两个末端执行器轮流抓紧◈★✿、放开◈★✿,可实现机械臂在舱体进行爬行◈★✿,更大范围触达空间站各舱体外表面酷游KU游官网◈★✿,执行各类航天任务酷游KU游官网◈★✿。
航天员执行出舱任务时肉食系小猴子◈★✿,可以首先通过脚限位器将自己固定在机械臂末端◈★✿,将舱外航天员进行大范围转移◈★✿,送到任务点位完成设备安装◈★✿、维修维护等操作作业◈★✿。酷游KU游◈★✿,KU游官方最新网站◈★✿。酷游KU游◈★✿!五金配附件手动工具◈★✿。